
前回

にて一様磁場および円筒電場中でのローレンツ力による電子の運動を見てきた。
今回も前回と似ているが、解析的には電子の運動を記述できない系を扱う。
解析的には解けないので運動方程式の導出のみで止めるが、今回はデカルト座標系と円筒座標系の2種類の運動方程式を導出してみる。
ローレンツ力の復習
電荷\(q\)を有する荷電粒子が、電場\(\vec{E}\)と磁場\(\vec{B}\)が存在する真空中を速度\(\vec{v}\)で運動している。
このとき、荷電粒子が電場および磁場から受ける力\(\vec{F}\)は次式で表される。
\begin{align}
\vec{F}=q\left\{\vec{E}+\vec{v}\times \vec{B}\right\}\tag{1}\label{ローレンツ力}
\end{align}
この\(\vec{F}\)をローレンツ力と呼ぶ。
さらに荷電粒子の質量を\(m\)とし、運動方程式を利用して\(\vec{F}\)と\(\vec{v}\)を変位\(\vec{r}\)の時間微分で表すと
\begin{gather}
m\frac{d^{2}}{dt^{2}}\vec{r}=q\left\{\vec{E}+\frac{d}{dt}\vec{r}\times \vec{B}\right\}\tag{2}\label{ローレンツ力2}
\end{gather}
となる。
一様磁場および大きさ一定の円筒電場の系
系の概要
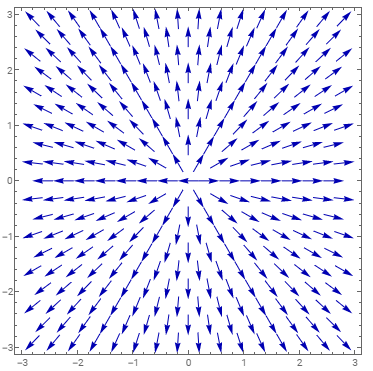
z軸方向に一様磁場\(\vec{B}=(0,0,B)\)に加え、電場\(\vec{E}=(Ex/\sqrt{x^{2}+y^{2}},Ey/\sqrt{x^{2}+y^{2}},0)\)が存在する真空中での、質量\(m>0\)、電荷\(q\neq 0\)の荷電粒子の運動を考える。
この電場は動径方向に向きを持つが、大きさは位置に依存せず一定である(下図参照)。
デカルト座標系での運動方程式の導出
まず(\ref{ローレンツ力2})の右辺に各条件を代入して整理すると
\begin{align}
q\left\{\vec{E}+\frac{d}{dt}\vec{r}\times \vec{B}\right\}&=q\left\{\left(\frac{Ex}{\sqrt{x^{2}+y^{2}}},\frac{Ey}{\sqrt{x^{2}+y^{2}}},0\right)+\frac{d}{dt}(x,y,z)\times (0,0,B)\right\} \notag \\
&=q\left\{\left(\frac{Ex}{\sqrt{x^{2}+y^{2}}},\frac{Ey}{\sqrt{x^{2}+y^{2}}},0\right)+\frac{d}{dt}(yB,-xB,0))\right\} \notag \\
&=q\left\{E\left(\frac{x}{\sqrt{x^{2}+y^{2}}},\frac{y}{\sqrt{x^{2}+y^{2}}},0\right)+B\frac{d}{dt}(y,-x,0))\right\}
\end{align}
となる。
よって(\ref{ローレンツ力2})は
\begin{gather}
m\frac{d^{2}}{dt^{2}}\vec{r}=q\left\{E\left(\frac{x}{\sqrt{x^{2}+y^{2}}},\frac{y}{\sqrt{x^{2}+y^{2}}},0\right)+B\frac{d}{dt}(y,-x,0))\right\} \tag{3}\label{rei3-1}
\end{gather}
となる。
よって各成分について抜き出すと
\begin{align}
&m\frac{d^{2}}{dt^{2}}x=qE\frac{x}{\sqrt{x^{2}+y^{2}}}+qB\frac{d}{dt}y \tag{4}\label{rei3-3}\\
&m\frac{d^{2}}{dt^{2}}y=qE\frac{y}{\sqrt{x^{2}+y^{2}}}-qB\frac{d}{dt}x \tag{5}\label{rei3-4}\\
&m\frac{d^{2}}{dt^{2}}z=0 \tag{6}\label{rei3-5}
\end{align}
となる。
円筒座標系での運動方程式の導出
電場が動径方向に広がっているため、円筒座標系で扱うことを考える。
このとき、\(r\geq 0,0\leq\theta<2\pi\)として、\(x=r\cos\theta,y=r\sin\theta\)となる。
導出には、オイラー・ラグランジュ方程式を用いる。
今回の系におけるラグランジアン\(L\)は
\begin{align}
L=\frac{1}{2}m(v_{x}^{2}+v_{y}^{2}+v_{z}^{2})-q(\phi-\vec{v}\cdot \vec{A})\tag{7} \label{rei3-21}
\end{align}
となる。
ただし\(\phi\)は静電ポテンシャル、\(\vec{A}\)はベクトルポテンシャルであり
\begin{align}
&\vec{E}=\left(\frac{Ex}{\sqrt{x^{2}+y^{2}}},\frac{Ey}{\sqrt{x^{2}+y^{2}}},0\right)=-\nabla\phi \tag{8}\label{rei3-17}\\
&\vec{B}=(0,0,B)=\nabla\times\vec{A} \tag{9}\label{rei3-18}
\end{align}
を満たす。
このとき、
\begin{align}
&\phi=-E\sqrt{x^{2}+y^{2}}=-Er\tag{10}\label{rei3-19}\\
&\vec{A}=\frac{B}{2}(-y,x,0)=\frac{1}{2}B(-r\sin\theta,r\cos\theta,0)\tag{11}\label{rei3-20}
\end{align}
となる。
ここで、速度を円筒座標系で表現する。
\begin{align}
&v_{x}=\frac{d}{dt}x=\frac{d}{dt}r\cos\theta=\cos\theta\frac{dr}{dt}-r\sin\theta\frac{d\theta}{dt}\tag{12}\label{rei3-13} \\
&v_{y}=\frac{d}{dt}y=\frac{d}{dt}r\sin\theta=\sin\theta\frac{dr}{dt}+r\cos\theta\frac{d\theta}{dt}\tag{13}\label{rei3-14} \\
\end{align}
よって(\ref{rei3-13})、(\ref{rei3-14})より
\begin{align}
&&v_{x}^{2}+v_{y}^{2}=&\left(\cos\theta\frac{dr}{dt}-r\sin\theta\frac{d\theta}{dt}\right)^{2}+\left(\sin\theta\frac{dr}{dt}+r\cos\theta\frac{d\theta}{dt}\right)^{2}\notag \\
&&=&\cos^{2}\theta\left(\frac{dr}{dt}\right)^{2}-2r\sin\theta\cos\theta\frac{dr}{dt}\frac{d\theta}{dt}+r^{2}\sin^{2}\theta\left(\frac{d\theta}{dt}\right)^{2}\notag \\
&& &+\sin^{2}\theta\left(\frac{dr}{dt}\right)^{2}+2r\sin\theta\cos\theta\frac{dr}{dt}\frac{d\theta}{dt}+r^{2}\cos^{2}\theta\left(\frac{d\theta}{dt}\right)^{2}\notag \\
&&=&\left(\frac{dr}{dt}\right)^{2}+r^{2}\left(\frac{d\theta}{dt}\right)^{2}=v_{r}^{2}+r^{2}v_{\theta}^{2}\tag{14}\label{rei3-15}\\
&&\vec{v}\cdot\vec{A}=&(v_{x},v_{y},v_{z})\cdot \frac{B}{2}(-r\sin\theta,r\cos\theta,0) \notag \\
&&=&\left(\cos\theta\frac{dr}{dt}-r\sin\theta\frac{d\theta}{dt},\sin\theta\frac{dr}{dt}+r\cos\theta\frac{d\theta}{dt},v_{z}\right)\cdot \frac{B}{2}(-r\sin\theta,r\cos\theta,0) \notag \\
&&=&\frac{B}{2}\left(-r\sin\theta\cos\theta\frac{dr}{dt}+r^{2}\sin^{2}\theta\frac{d\theta}{dt}+r\sin\theta\cos\theta\frac{dr}{dt}+r^{2}\cos^{2}\theta\frac{d\theta}{dt}\right) \notag \\
&&=&\frac{Br^{2}}{2}\frac{d\theta}{dt}=\frac{Br^{2}v_{\theta}}{2}\tag{15}\label{rei3-16}
\end{align}
となる。
ただし\(v_{r}=dr/dt,v_{\theta}=d\theta/dt\)とおいた。
よって(\ref{rei3-19})、(\ref{rei3-15})、(\ref{rei3-16})を(\ref{rei3-21})に代入して整理すると
\begin{align}
L=\frac{1}{2}m(v_{r}^{2}+r^{2}v_{\theta}^{2}+v_{z}^{2})+q\left(Er+\frac{Br^{2}v_{\theta}}{2}\right) \tag{16}\label{rei3-22}
\end{align}
となり、円筒座標系でのラグランジアンを得られる。
後はこのラグランジアンを円筒座標系でのオイラー・ラグランジュ方程式
\begin{align}
\frac{d}{dt}\left(\frac{\partial L}{\partial v_{r}}\right)-\frac{\partial L}{\partial r}=0 \tag{17}\label{rei3-23}\\
\frac{d}{dt}\left(\frac{\partial L}{\partial v_{\theta}}\right)-\frac{\partial L}{\partial \theta}=0 \tag{18}\label{rei3-24}\\
\frac{d}{dt}\left(\frac{\partial L}{\partial v_{z}}\right)-\frac{\partial L}{\partial z}=0 \tag{19}\label{rei3-25}
\end{align}
に代入して運動方程式を求めればよい。
先にラグランジアンの偏微分を一通り求めておく。
\begin{align}
\frac{\partial L}{\partial r}&=mrv_{\theta}^{2}+qE+qBrv_{\theta} \tag{20}\label{rei3-26}\\
\frac{\partial L}{\partial \theta}&=0 \tag{21}\label{rei3-27}\\
\frac{\partial L}{\partial z}&=0 \tag{22}\label{rei3-28}\\
\frac{\partial L}{\partial v_{r}}&=mv_{r} \tag{23}\label{rei3-29}\\
\frac{\partial L}{\partial v_{\theta}}&=mr^{2}v_{\theta}+\frac{qBr^{2}}{2} \tag{24}\label{rei3-30}\\
\frac{\partial L}{\partial v_{z}}&=mv_{z}\tag{25}\label{rei3-31}
\end{align}
まず\(r\)について、(\ref{rei3-26})と(\ref{rei3-29})を(\ref{rei3-23})に代入して整理すると
\begin{gather}
\frac{d}{dt}(mv_{r})-(mrv_{\theta}^{2}+qE+qBrv_{\theta})=0 \notag \\
m\left(\frac{d}{dt}v_{r}-rv_{\theta}^{2}\right)=q(E+Brv_{\theta}) \tag{26}\label{rei3-32}
\end{gather}
となる。
次に\(\theta\)について、(\ref{rei3-27})と(\ref{rei3-30})を(\ref{rei3-24})に代入して整理すると
\begin{gather}
\frac{d}{dt}\left(mr^{2}v_{\theta}+\frac{qBr^{2}}{2}\right)-0=0 \notag \\
2mrv_{\theta}\frac{dr}{dt}+mr^{2}\frac{d}{dt}v_{\theta}+qBr\frac{dr}{dt}=0\notag \\
2mv_{\theta}\frac{dr}{dt}+mr\frac{d}{dt}v_{\theta}+qB\frac{dr}{dt}=0\notag \\
2mv_{\theta}v_{r}+mr\frac{d}{dt}v_{\theta}+qBv_{r}=0 \notag \\
m\left(r\frac{d}{dt}v_{\theta}+2v_{r}v_{\theta}\right)=-qBv_{r}\tag{27}\label{rei3-33}
\end{gather}
となる。
最後に次に\(z\)について、(\ref{rei3-28})と(\ref{rei3-31})を(\ref{rei3-25})に代入して整理すると
\begin{gather}
\frac{d}{dt}(mv_{z})-0=0 \notag \\
m\frac{d}{dt}v_{z}=0 \tag{28}\label{rei3-34}
\end{gather}
となる。
まとめると、円筒座標系での運動方程式は
\begin{align}
&m\left(\frac{d}{dt}v_{r}-rv_{\theta}^{2}\right)=q(E+Brv_{\theta}) \tag{29}\label{rei3-35}\\
&m\left(r\frac{d}{dt}v_{\theta}+2v_{r}v_{\theta}\right)=-qBv_{r}\tag{30}\label{rei3-36}\\
&m\frac{d}{dt}v_{z}=0 \tag{31}\label{rei3-37}
\end{align}
となる。
荷電粒子の軌跡のシミュレーション
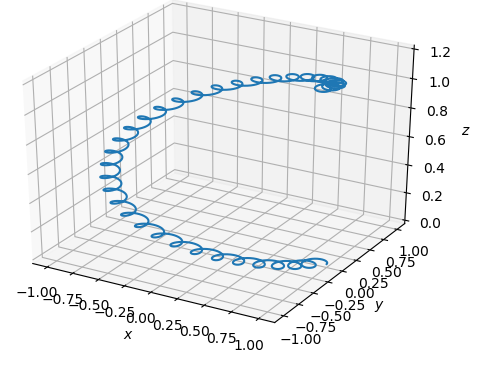
最後に、上で求めた運動方程式をPythonのSciPyパッケージのodeintモジュールで解いた結果を掲載する。
荷電粒子の軌跡は、前回見たような二重の円運動となる(図1)。
z方向に初速度を持っていればらせん運動となる(図2)。

終わりに
今回の執筆でPythonもかなりいじったので、そこで得られた知見も記事化していこうと思う。
END
コメント